Hello,
I am prototyping a system using the MAQ473 and I’m observing an unexpected result. When the system is moving in a periodic fashion, the measured angle error accumulates slowly up to an offset error of up to 5 degrees over the period of about a minute. After stopping the system, the accumulated error returns to 0. Here is a graph of the output (ignore ramping up and ramping down periods):
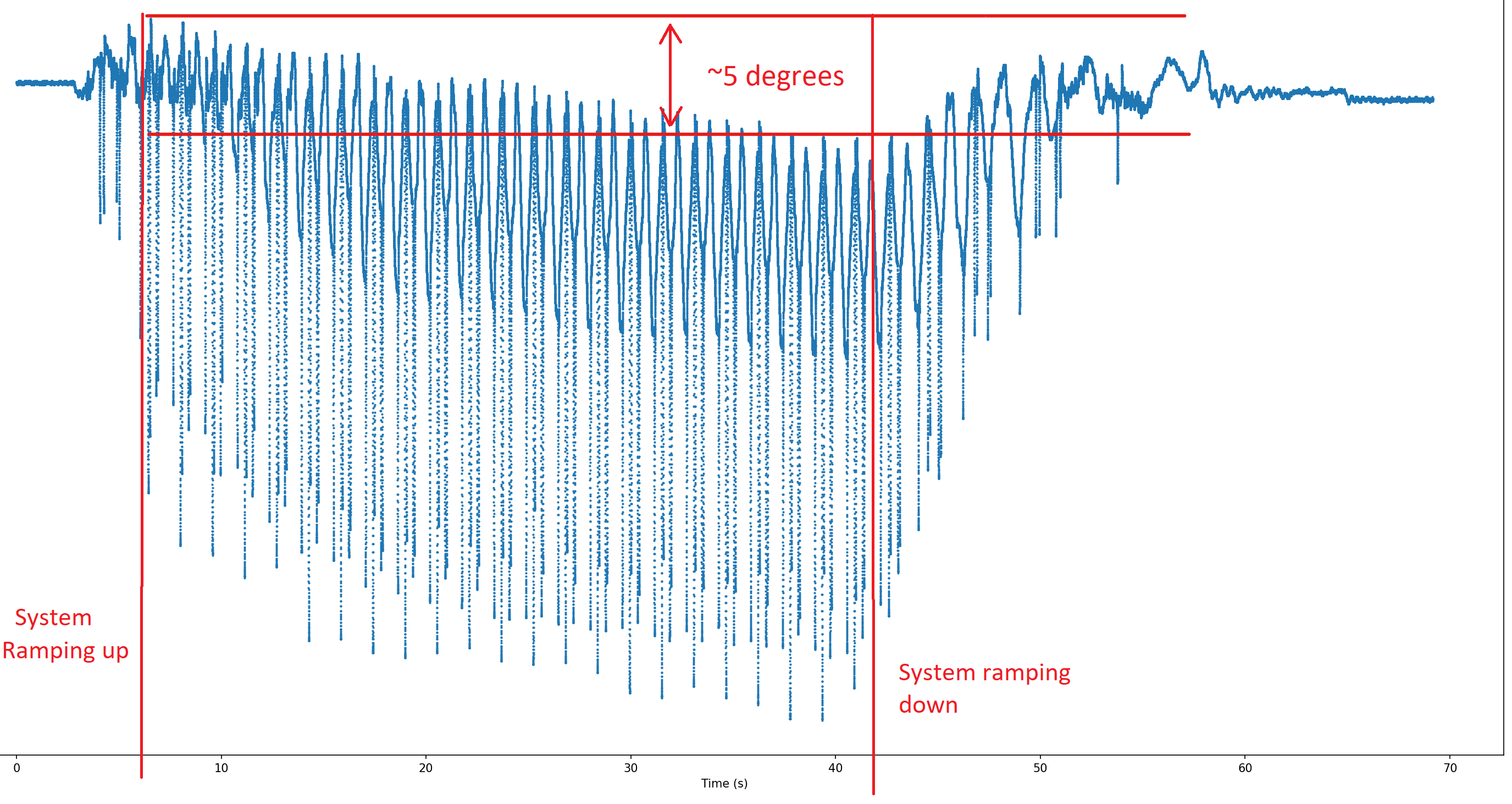
The peaks and troughs of this signal should be roughly equal in magnitude for each period after the system has ramped up and it has ramped down.
Things I have tried:
- Ensure the magnet is securely placed.
- Ensure the sensor is securely placed.
- Lower the built-in filter window (tried values of 0x33 and 0x00, with similar results).
The data is being read out from the MAQ473 over a SPI bus with a custom driver. However, there is no additional processing of the data occurring.
Is there some internal filtering or processing of the data that could lead to such a result? Is there any way to mitigate this result?
Thanks,
Desmond